|
AFBR-S50 API Reference Manual v1.6.6
AFBR-S50 Time-of-Flight Sensor SDK for Embedded Software
|
|
AFBR-S50 API Reference Manual v1.6.6
AFBR-S50 Time-of-Flight Sensor SDK for Embedded Software
|
This file is part of the RA4M2 platform layer. More...
#include "uart_api.h"#include "driver/uart.h"#include "driver/irq.h"#include "main.h"#include "hal_data.h"#include <assert.h>#include <stdio.h>#include <stdarg.h>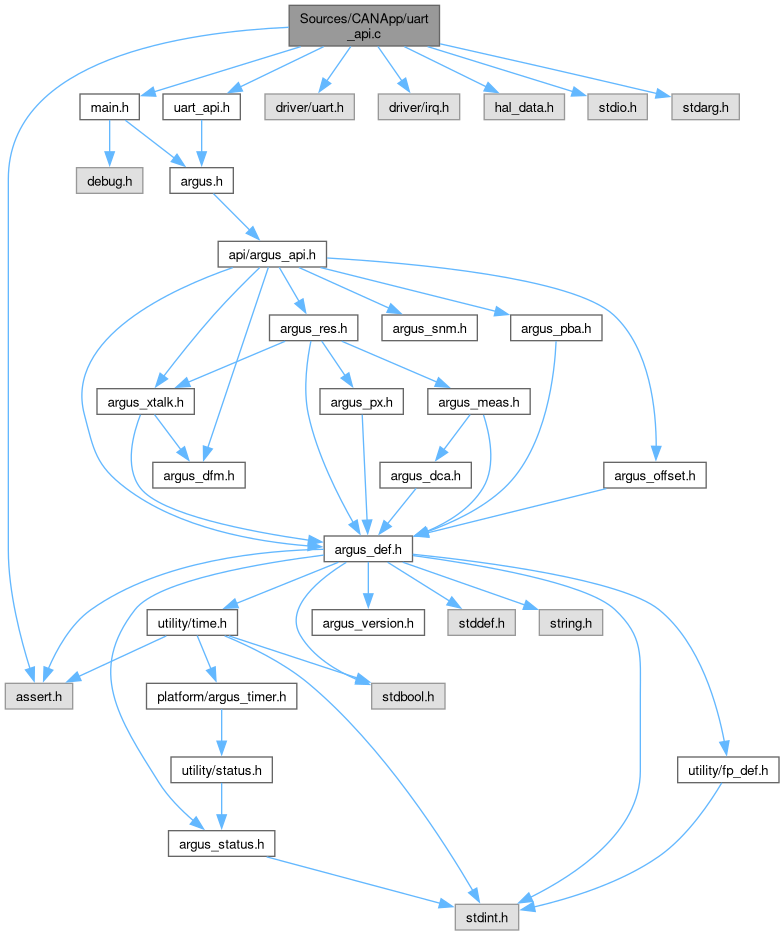
Enumerations | |
| enum | argus_uart_t { UART_START = 's' , UART_STOP = 'p' } |
Functions | |
| static void | uart_rx_callback (uint8_t const *data, uint32_t const size) |
| void | UART_API_Init (void) |
| Initializes the UART API module. | |
| void | UART_Send1D (argus_results_t const *res) |
| Prints measurement results via UART. | |
| void | UART_HandleCommand (void) |
| Handles incoming UART commands by invoking the corresponding methods. | |
Variables | |
| static volatile uint8_t | myUartRxData |
This file is part of the RA4M2 platform layer.
This file provides UART driver functionality.
Copyright (c) 2022, Broadcom Inc All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
| enum argus_uart_t |
|
static |
Callback invoked from the UART interface for incoming data.
|
static |
Indicates received UART data.