|
AFBR-S50 API Reference Manual v1.6.6
AFBR-S50 Time-of-Flight Sensor SDK for Embedded Software
|
|
AFBR-S50 API Reference Manual v1.6.6
AFBR-S50 Time-of-Flight Sensor SDK for Embedded Software
|
AFBR-S50 CAN Demo Application. More...
#include "main.h"#include "uart_api.h"#include "can_api.h"#include "can_app_version.h"#include "board/board.h"#include "driver/irq.h"#include "driver/bsp.h"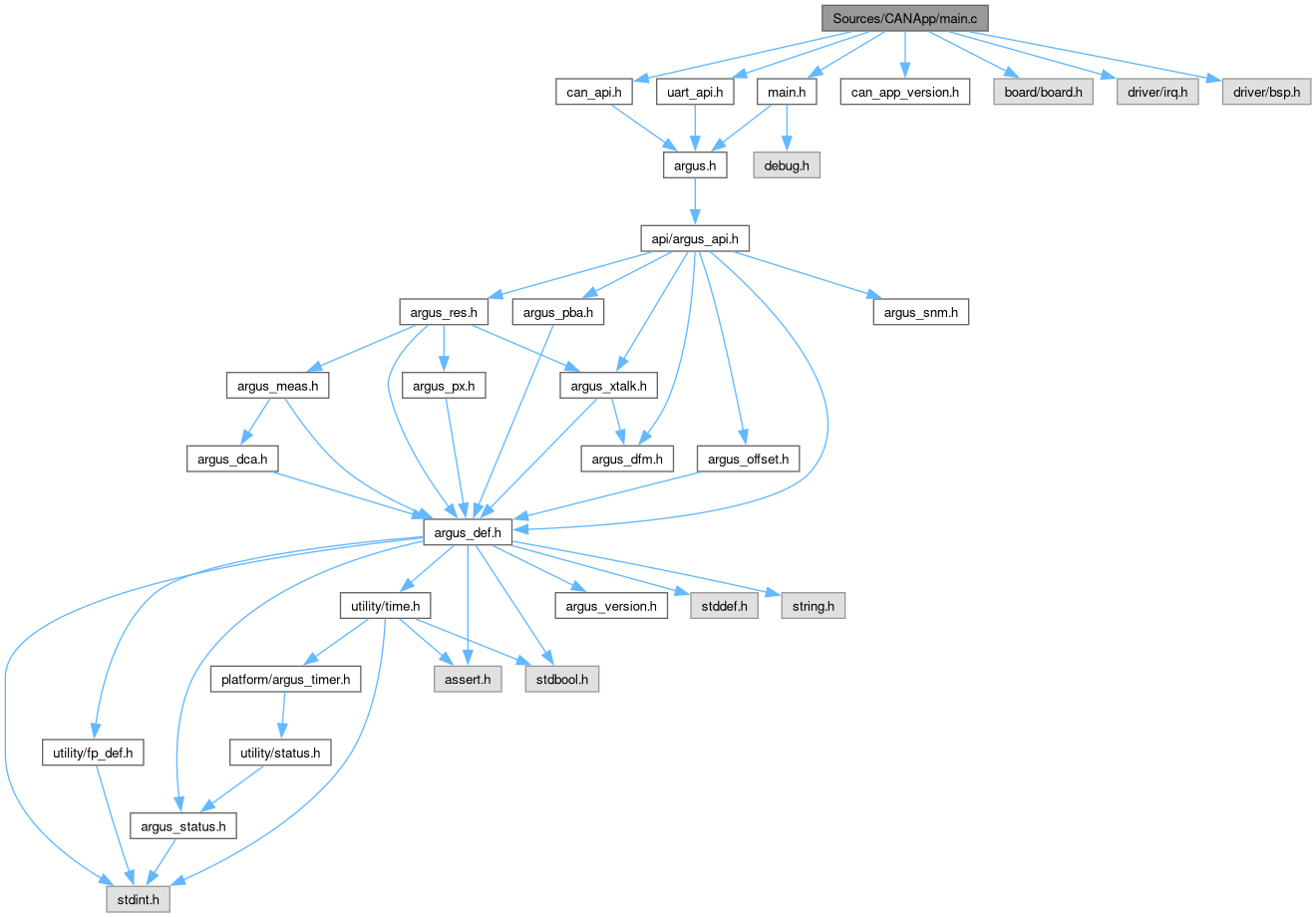
Macros | |
| #define | SPI_SLAVE 1 |
| #define | SPI_BAUD_RATE 6000000 |
Functions | |
| static void | print_help (void) |
| Prints a help string to the serial interface. | |
| status_t | measurement_ready_callback (status_t status, argus_hnd_t *device) |
| Measurement data ready callback function. | |
| int | main (void) |
| Application entry point. | |
| void | start_measurements (void) |
| Starts measurements via the AFBR-S50 API. | |
| void | stop_measurements (void) |
| Stops the currently ongoing measurements via the AFBR-S50 API. | |
| void | handle_error (status_t status, char const *msg) |
| A very brief example for error handling. | |
Variables | |
| static volatile uint8_t | myDataReadyEvents = 0 |
| argus_hnd_t * | hnd = 0 |
AFBR-S50 CAN Demo Application.
Copyright (c) 2022, Broadcom Inc All rights reserved.
Redistribution and use in source and binary forms, with or without modification, are permitted provided that the following conditions are met:
THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.